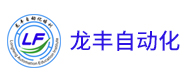




工業(yè)機器人的應用
1.金屬成形:金屬成形是機床工具的重要組成部分,工業(yè)機器人與成形機床的集成,可以提高加工效率、精度和安全性,解決企業(yè)用人問題。在金屬成形領域,工業(yè)機器人主要有數(shù)控折彎機集成應用、壓力機沖壓集成應用、熱模鍛集成應用、焊接應用等幾個方面。
2.電子電氣行業(yè):工業(yè)機器人在電子IC、貼片元器件等領域的應用均較普遍。它們可以完成分揀箱、撕膜系統(tǒng)、激光塑料焊接、高速碼垛等一系列操作,提高了生產效率和精度。
| 課程模塊 | 課程內容 |
|
發(fā)那科(FANUC)機器人 |
種類介紹;ROBOT 安全知識及注意事項;在使用過程中的安全知識及保護措施;硬件組成及接線;控制柜的各組成部分功能及應用介紹;控制柜的接線;示教器的使用;空間坐標系介紹(JOINT,JGFRM );機器人JOINT;JGFRM坐標系的操作實踐;動作指令介紹;動作指令綜合操作實踐及練習;操作實踐等 |
|
ROBOGUIDE |
概述;安裝界面介紹;操作實踐;控制柜網絡設定;示教盒的使用介紹;備份介紹;案例操作及項目練習;使用RobotStudio軟件進行備份和恢復、在線編輯IO系統(tǒng)、在線編輯RAPID程序、在線設定用戶操作權限、設置單個軸的運動范圍 |
|
通信部分 |
總線通訊介紹,與PLC通信控制;總線通信設計;CC-LINK通信;PROFIBUS通信;DEVICENET通信;ETHERNET IP通信;機器人多種通信操作實踐;機器人與PC 的通訊設置 |
| 相關介紹 | TCP 介紹、設定及使用;機器人坐標系介紹及設置(TOOL FRAME,USER FRAME );程序管理介紹;抓取和擺放工件實例介紹;Simulation 功能介紹; Calibration 介紹及學習掌握;機器人I/O 介紹及設置;安全點介紹及設置;搬運、弧焊等功能參數(shù)介紹;文件輸入輸出介紹及實際操作 (文件備份和IMAGE備份);背景程序編輯介紹;應用功能介紹;初始化及系統(tǒng)恢復介紹; 控制指令介紹;MARCO 介紹及設置;自動運行介紹及操作;機器人系統(tǒng)功能設置介紹;機器人驅動部分機械介紹;軟件菜單欄的介紹; Vision 編程介紹;機器人控制器部件功能介紹;故障緊急停機電路介紹 |
|
實操實踐 |
各機器人操作實踐 ;機器人坐標系TOOL FRAME;USER FRAME坐標系的操作實踐;機器人多種坐標系的設定;反復操練;項目操作及總結;關節(jié)、直線、圓弧C、圓弧A等動作的編程及操練; 多個搬運程序、弧焊等程序的編程及實操;搬運程序的編程及實操、焊接程序的編程及實操、螺旋涂膠程序的編程及實操;機器人動作指令綜合操作實踐及練習等 |
|
相關的創(chuàng)建 |
創(chuàng)建Workcell;仿真測試程序;創(chuàng)建機器人行走軸; 創(chuàng)建輸送帶;創(chuàng)建工件坐標;創(chuàng)建運動軌跡;創(chuàng)建機械裝置;創(chuàng)建用戶工具;利用自建數(shù)模創(chuàng)建;利用模型庫創(chuàng)建;創(chuàng)建帶導軌的機器人系統(tǒng);創(chuàng)建帶變位機的機器人系統(tǒng) |
|
ABB機器人 |
概述;選型和構成;系統(tǒng)備份和恢復;轉數(shù)計數(shù)器更新;常用ABB標準IO板介紹 |
|
程序與指令 |
程序的編寫、測試、修改程序;編寫測試程序;程序數(shù)據(jù);搬運程序的編寫;功能子程序,中斷程序;106.RAPID程序;動作指令(MoveABSJ, MoveJ, MoveL, MoveC);邏輯指令(賦值指令、待命指令、I/O 指令、跳躍指令、調用指令等指令詳細深入編程學習) |
| 機器人安裝維護 |
機器人零點位置校對;機器人機械故障診斷;機器人機械部分定期維護保養(yǎng);點動機器人(關節(jié),線性,重定位);為機器人安裝工具;導入機器人安裝系統(tǒng) |
|
其他操作 |
利用信號控制;文件的恢復及系統(tǒng)恢復;電源流路;開/關控制;CPU 概述;Vision 設置;LOCATOR TOOL 學習及掌握;第二代IRC5 Compact控制柜接線說明;示教器使用;關節(jié)坐標系,大地坐標系,基坐標系;工具坐標TOOLDATA,工件坐標系WOBJDATA;有效載荷LOADDATA(手動輸入,自動測量);IO硬件接線和配置(配置編程按鈕);自動運行;系統(tǒng)輸入輸出與IO信號的關聯(lián);放置周邊的對象;建模功能使用及模型導入等 |
實踐
導向
個性
教學
老師
指導
先進
設備
工業(yè)機器人的類型
圓柱形機器人。圓柱形機器人具有沿關節(jié)軸旋轉的旋轉關節(jié)和用于線性運動的棱柱形關節(jié)。圓柱形機器人具有至少一個旋轉關節(jié)和至少一個用于在底部連接連桿的移動關節(jié)。沿著關節(jié)軸線,旋轉關節(jié)采用旋轉運動;沿著棱柱接頭,它以直線運動的方式移動。它們的運動發(fā)生在圓柱形工作范圍內。圓柱形機器人用于裝配操作、機床和壓鑄機的搬運以及點焊。

系統(tǒng)掌握工業(yè)機器人的基本原理和應用技術。
熟悉工業(yè)機器人的編程和調試技巧。
具備工業(yè)機器人的維護和故障排除能力。
掌握工業(yè)機器人安全操作規(guī)范,提高工作安全意識。
課程背景
濟南工業(yè)機器人培訓學校是一所專注于工業(yè)機器人技術培養(yǎng)的職業(yè)教育機構。作為當?shù)刂墓I(yè)機器人培訓機構,我們致力于為學生提供優(yōu)質的機器人操作和維護技能培訓,幫助他們掌握先進的工業(yè)機器人應用技術,滿足日益增長的行業(yè)人才需求。我們注重理論與實踐相結合,以學生為中心,努力為學生創(chuàng)造優(yōu)質的學習環(huán)境和成長機會。
課程特色
1. 先進的培訓設備:我們擁有各類型號的工業(yè)機器人,為學生提供豐富的實操練習機會。
2. 實戰(zhàn)化的教學模式:課程設置緊密結合行業(yè)需求,注重培養(yǎng)學生的實際操作能力。
3. 經驗豐富的師資團隊:我們聘請了一批具有豐富工作經歷的行業(yè)講師擔任講師,確保教學質量。
4. 個性化的培訓方案:針對學生的不同需求,我們提供個性化的培訓計劃,幫助學生提升技能。
課程目標
1. 掌握工業(yè)機器人的基本原理和操作方法。
2. 熟練運用工業(yè)機器人進行自動化生產和加工。
3. 具備工業(yè)機器人維護和故障診斷的能力。
4. 滿足企業(yè)對工業(yè)機器人操作和維護人才的需求。
學習對象
1. 有意向從事工業(yè)機器人相關工作的在校學生。
2. 希望提升工業(yè)機器人操作技能的在職人員。
3. 對工業(yè)機器人技術有興趣的個人學習者。
課程內容
1. 工業(yè)機器人基礎知識:包括機械結構、控制系統(tǒng)、編程語言等。
2. 工業(yè)機器人操作實踐:涵蓋各類型號機器人的編程和控制操作。
3. 工業(yè)機器人維護與故障診斷:培養(yǎng)學生的維修和保養(yǎng)技能。
4. 工業(yè)機器人應用案例分析:解析不同行業(yè)的機器人應用場景。
師資力量
我們聚集了一支經驗豐富的師資團隊,他們來自于知名企業(yè)和科研機構,擁有扎實的理論基礎和豐富的實操經驗。他們在工業(yè)機器人領域有著深入的研究和實踐,能夠為學生提供專業(yè)、系統(tǒng)的培訓。
教學質量
我們注重理論與實踐相結合,采用理論講解、模擬訓練和實操演練相結合的教學模式,確保學生能夠全面掌握工業(yè)機器人的相關知識和技能。此外,我們還會定期對學生進行技能考核,及時了解學習進度,并針對性地提供輔導和指導。
服務水平
我們本著"以學生為中心"的服務理念,為學生提供周到、貼心的學習輔助。從入學咨詢、課程安排到就業(yè)指導,我們都會竭盡全力為學生提供優(yōu)質服務,確保他們有一個舒適、有效的學習體驗。
學習時長
我們的工業(yè)機器人培訓課程時間一般為3-6個月不等,具體以實際課程安排為準。在此期間,學生可以深入學習工業(yè)機器人的理論知識和實踐操作,為將來的職業(yè)發(fā)展奠定堅實基礎。
收費范圍
我們的培訓費用一般在5000元至20000元之間,具體價格會根據(jù)課程內容、培訓時長等因素而有所不同。我們會提供靈活的付費方式,以確保學生能夠負擔得起。
學習收獲
通過我們的培訓,學生不僅可以掌握工業(yè)機器人的基本原理和操作技能,還能夠了解行業(yè)前沿動態(tài),培養(yǎng)解決實際問題的能力。學完課程后,學生可以勝任工業(yè)機器人操作、維護、編程等工作,為未來的職業(yè)發(fā)展奠定基礎。
總結
以上信息僅供參考,實際情況以到校咨詢?yōu)闇省H绻鷮ξ覀兊墓I(yè)機器人培訓感興趣,歡迎您隨時聯(lián)系在線客服,預約免費體驗課。我們將竭盡全力為您提供優(yōu)質的教學服務,助力您實現(xiàn)職業(yè)夢想。
 勤學教育網
勤學教育網